
Artículo redactado por Alejhandro Navarro, colaborador de Revista de Robots
Alejhandro Navarro es un ingeniero Mecánico con postgrado en Mecatrónica, Coordinador de Proyectos de AN Mecatrónica y autor del libro “Robot industrial, Manual de instalación”.

Lo primero que debemos comprender es el desarrollo de una célula robotizada, el cual es un proceso mecatrónico y por ende el equipo a trabajar en el diseño y desarrollo debe estar conformado por miembros multidisciplinarios como ingenieros electricistas o electrónicos, mecánicos, civiles, de métodos, entre otros; ya que la célula no está compuesta sólo por el robot, sino que también este se integrará en un proceso productivo.
Al comprender que el robot es uno de los elementos, mas no el único (sin duda, uno de los más importantes) de la célula robotizada, debemos identificar los componentes de esta.
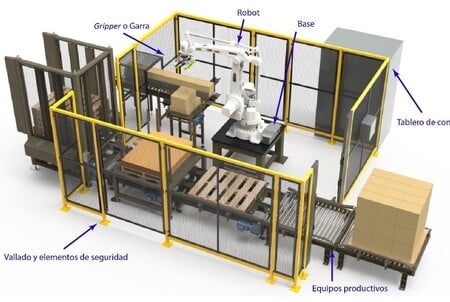
Una célula como mínimo tiene los siguientes componentes: robot, base, garra o elemento de final de trabajo, vallado, tablero de control y equipos productivos. Si estamos trabajando con un robot colaborativo ya no será necesario el vallado y si la aplicación no es de picking o paletizado no se utilizaría una garra sino, quizás, una pistola para pintar, una herramienta de soldadura, etc.
Conociendo los componentes que debemos definir durante el desarrollo de la célula, lo siguiente sería establecer el orden para identificar cada uno de ellos.
En el libro «Robot Industrial, manual de instalación» proponemos el siguiente procedimiento para desarrollo de la célula robotizada:
- Selección del robot.
- Elección de la garra o elemento final de trabajo.
- Diseño de la fundación o cimientos para la base del robot.
- Instalación de los elementos de protección y seguridad de la célula robotizada.
- Elaboración de los sistemas de control y comunicación.
- Programación del robot.
Aunque para algunos este procedimiento podría parecer lógico o trivial, en la práctica se encuentra muchos defectos o robots con mal funcionamiento debido a no cumplirlo.
Realmente la primera etapa sería una preselección del robot industrial, se puede escoger la familia del robot más no el modelo en específico; es decir, por el tipo de aplicación, volumen de trabajo, velocidad, ambiente de trabajo y marcas podríamos preseleccionar un robot, pero luego al definir la garra o elemento final de trabajo debemos ir a comprobar si dicho robot realmente soporta esa carga (peso) o si debemos escoger uno de mayor capacidad de carga o de menos.
Durante la preselección del robot, se demuestra la necesidad de trabajar con un equipo multidisciplinario, entre ellos el especialista en tiempos, ya que sería algo grave que después de instalar el robot este se convierta en un cuello de botella o retraso para la producción.

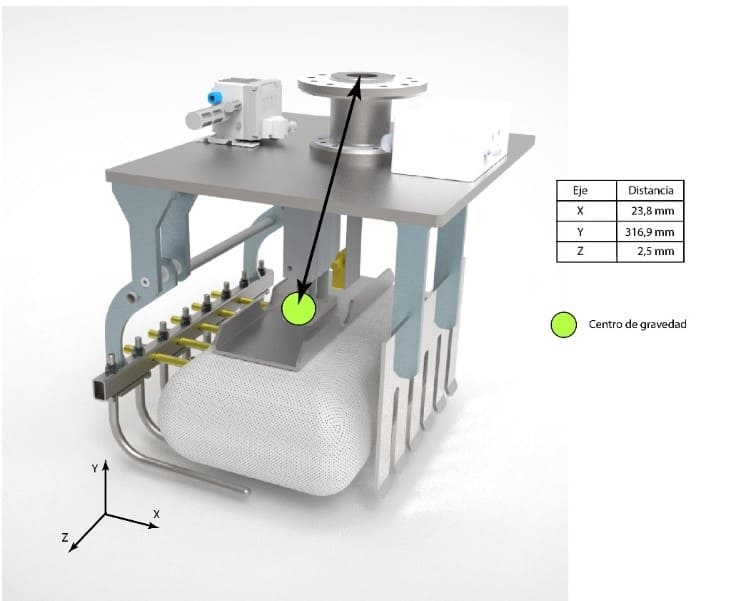
En la elección o diseño de la garra es vital contar con un ingeniero mecánico en el equipo debido a que una de las tareas principales es que el centro de gravedad resultante de la garra esté lo más cerca posible del eje Z del 6º eje o brida del robot, ya que este es el punto que se debe introducir cuando evaluamos la carga de un robot. ¡En la siguiente imagen se puede ver un ejemplo, el punto naranja que se ubicó en la gráfica de carga del robot KUKA KR-300-2 PA es el centro de gravedad compuesto de una garra que se está evaluando!
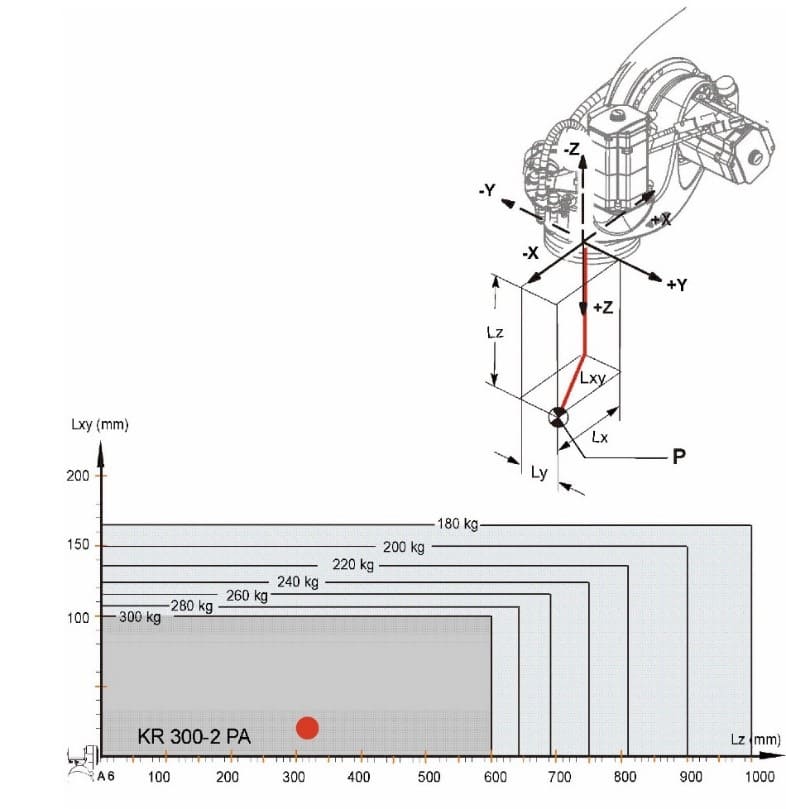
Un punto muy relevante es entender que, para evaluar la capacidad de carga se haría con el estado de mayor peso, es decir, cuando la garra tenga el elemento a manipular de mayor peso, ese sería el centro de gravedad compuesto a utilizar.
Pero a la hora de programar, se debe definir cada una de las herramientas o tools (como comúnmente se conoce en las diferentes marcas de robot) que no es más que ingresar los diferentes pesos de la garra que realmente se emplearán con sus centros de gravedad, como mínimo en una aplicación de paletizado se tendrían 2 tools, que sería los valores de la garra con el producto a manipular y sin él. El no emplear los valores correctos de cada herramienta es una de las causas típicas al observar robots cuyo movimiento no es armónico y significa que el robot está realizando movimientos ejerciendo rampas de aceleración y frenado incorrectas, y esto es la resultante de que el robot no conoce realmente cuál es la correcta inercia de lo que está transportando.
Una etapa, que por lo general no se le presta la importancia correcta, es la tercera de evaluación de los cimientos y que esto sea realizado por un ingeniero civil o especializado en cálculos estructural, que tenga la capacidad de evaluar si los cimientos y la base que se están proponiendo tiene la capacidad para soportar las altas cargas estáticas y dinámicas que genera el robot. Unos malos cimientos pueden generar vibraciones que puede generar fallos en la comunicación y problemas con la calibración.
La robótica está directamente relacionada con el control y la seguridad, por ende los pasos 4 y 5 del procedimiento son vitales y más en la actualidad con la tendencia de la Industria 4.0, donde todo debe estar interconectado y relacionado. En función de la aplicación debemos utilizar las tecnologías adecuadas, como la visión artificial, seguridad de máquina, buses de campos, etc.

Estos son sólo algunos de elementos, por lo que se recomienda emplear un equipo mecatrónico y seguir un detallado proceso de desarrollo de la célula robotizada, ya que un error en las primeras etapas (donde se requiere tener la participación de este equipo multidisciplinario) significaría una gran pérdida de dinero y tiempo, hasta el punto de tener que sustituir el robot. En cambio, si el error es en la etapa de programación, tenemos la oportunidad de corregir la falla y sólo sufrir una pérdida de tiempo.
Artículo redactado por Alejhandro Navarro, Coordinador de Proyectos de AN Mecatrónica y autor del libro “Robot industrial, Manual de instalación”, el cual está a tu disposición en la editorial Paraninfo en el siguiente enlace
Revista de Robots te recomienda: