
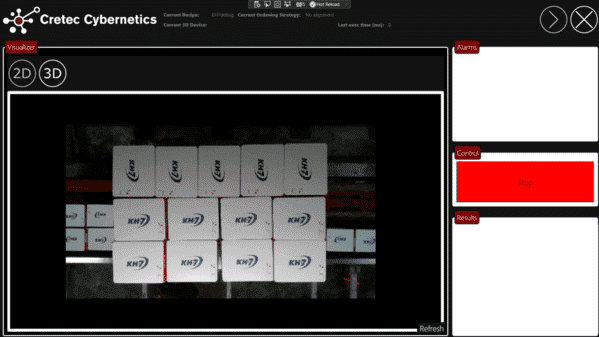
La empresa Cretec Cybernetics implementó una solución de despaletización basada en robots utilizando el software de procesamiento de imágenes MVTec HALCON. La aplicación es capaz de reconocer las cajas apiladas en los palés y despaletizarlas según el orden.
Un transporte interno de mercancías bien diseñado es un factor esencial para una intralogística eficaz. La intralogística en su conjunto se caracteriza por procesos sofisticados que comienzan con la recepción de mercancías, pasando por el almacenamiento y la preparación de pedidos hasta la entrega. La visión artificial proporciona valiosos servicios a lo largo de este flujo de trabajo. Como «ojo de la logística», el moderno software de procesamiento de imágenes ofrece todos los métodos y tecnologías necesarios para la lectura de caracteres, códigos y símbolos. Incluso las tareas de puesta en marcha pueden automatizarse completamente con sistemas de visión artificial.

Un ejemplo de cómo puede utilizarse la visión artificial para optimizar los procesos lo ofrece Cretec Cybernetics. Esta empresa, con sede en Budingen (Alemania) y Mataró (España), está especializada en soluciones de automatización basadas en el procesamiento de imágenes y en la visión artificial multidimensional. Por encargo de KH Lloreda, líder del mercado español de limpiadores de cocina y quitamanchas, Cretec Cybernetics ha desarrollado, con el apoyo del software de visión artificial HALCON de MVTec, una solución de despaletización basada en robots en la preparación de pedidos. La perfecta interacción de la robótica y el software de procesamiento de imágenes dentro de la aplicación permite identificar las diferentes posiciones de las cajas en los palés y despaletizarlas posteriormente. Todo el proceso está totalmente automatizado.
La visión artificial reconoce las desviaciones de la norma
Cretec Cybernetics pudo implementar la aplicación en las tecnologías e infraestructuras existentes en KH Lloreda. «El proceso de paletización de KH Lloreda ya estaba automatizado con un perfilador de líneas láser, que implicaba un movimiento relativo entre el sensor y la capa de productos. Esto daba lugar a tiempos de ciclo elevados y, por tanto, a un rendimiento y una productividad no óptimos. Por lo tanto, era obligatorio cambiar a un sistema de visión de máquina de un solo paso», explica Irene Vázquez Martín, ingeniera de aplicaciones de Cretec Cybernetics. Esto es necesario debido a las diferentes posiciones de carga y arranque de los palets dentro del flujo de trabajo intralogístico, que la anterior solución de automatización no podía tener en cuenta. Para aumentar la productividad y cubrir nuevos casos de uso, la empresa cambió a una solución basada en visión artificial.
«La visión artificial en combinación con la robótica es perfectamente adecuada para el transporte interno de mercancías. Para que el cliente se beneficie, hemos tenido que superar una serie de retos durante la implementación. Sobre todo, hay que mencionar el entorno de trabajo de los robots, que cambia dinámicamente y nunca es el mismo, y que se ha revelado como el mayor reto», afirma Vázquez Martín. Sobre todo, cuando se trata de la preparación de pedidos, el robot se enfrenta constantemente a nuevas circunstancias. Esto significa que no todos los palés se cargan de forma idéntica, y las cajas pueden variar mucho en posición y tamaño, lo que dificulta que el robot agarre paquetes individuales que se desvían de la norma. Además, las malas condiciones de iluminación de los almacenes dificultan la captura de imágenes de alta resolución, un requisito esencial para una aplicación de visión. De ahí la necesidad de contar con un hardware robusto y un software de visión artificial. La aplicación de Cretec Cybernetics es capaz de analizar con precisión palés de hasta cinco capas para conocer el número y la posición de las cajas, y despaletizarlas en consecuencia.
Potentes algoritmos de MVTec HALCON
En la aplicación basada en robots se utiliza el software estándar para visión artificial MVTec HALCON. MVTec Software GmbH, con sede en Múnich (Alemania), es uno de los principales proveedores internacionales de software para el procesamiento industrial de imágenes. MVTec HALCON es un completo software estándar de visión artificial y cuenta con un entorno de desarrollo integrado (HDevelop), así como con la biblioteca de procesamiento de imágenes, con una variedad de tecnologías de visión artificial de última generación. «Elegimos HALCON porque el software nos permite desarrollar algoritmos robustos y fiables en muy poco tiempo», afirma Vázquez Martín. La programación de potentes algoritmos con HALCON permitió realizar las mejoras funcionales necesarias en el sensor 3D utilizado por el cliente. El sensor se utiliza en el entorno dinámico sin fuentes de luz adicionales.
La aplicación para la preparación de pedidos desarrollada por Cretec Cybernetics procede como sigue: Tras la recepción del pedido, comienza la integración del proceso de despaletización automatizado. En el centro de esta aplicación se encuentra un robot Fanuc con un sensor 3D FRAMOS D415e acoplado a su brazo. El robot recibe la solicitud de un nuevo pedido y se desplaza hasta el palé de productos previsto para ello. Tras detenerse en la paleta de productos prevista, el sensor captura una imagen de la disposición de la capa superior de la paleta actual. HALCON procesa la información sobre el número de cajas y las coordenadas correspondientes y las devuelve al robot. A continuación, el robot despaletiza capa por capa hasta alcanzar el número de cajas de la referencia actual requeridas en el pedido. Después, paletiza las cajas en el palé vacío donde se está construyendo el pedido. Este proceso se repite para cada estación con diferentes productos hasta completar el pedido. Durante esta operación, no es necesaria la intervención del usuario, por ejemplo, para los cambios de producto entre estaciones.
Las innovadoras tecnologías de visión artificial permiten extraer con precisión las coordenadas
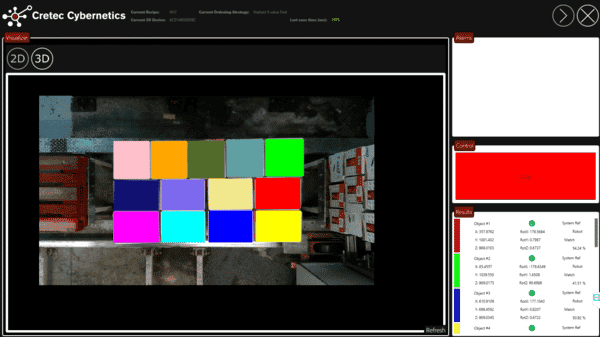
Para garantizar que la aplicación de despaletización pueda utilizarse sin dificultad en las operaciones cotidianas de la fábrica de KH Lloreda, la implementación se basó en las potentes tecnologías de visión artificial Regiones Extremas Máximamente Estables (MSER) y transformación 3D proporcionadas por la biblioteca HALCON. El procesamiento de las imágenes se realiza sobre imágenes XYZ que son recuperadas por el sensor del brazo del robot. Utilizando las potentes bibliotecas HALCON y la placa de calibración personalizada, Cretec Cybernetics adaptó el proceso de calibración mano-ojo a las necesidades específicas del usuario. Mediante el asistente de calibración de la aplicación, sólo hay que tomar unas cuantas adquisiciones diferentes en distintas posturas alrededor de la placa de calibración para que la aplicación calcule la calibración mano-ojo final.
Las tres tecnologías se utilizan una tras otra y según las actividades requeridas. En el primer paso, se aplica el algoritmo MSER sobre la imagen Z, lo que significa que se segmentan los componentes individuales de la totalidad de las cajas. Estos componentes corresponden a las cajas individuales. A continuación, basándose en la información de las imágenes XYZ, se calcula la ubicación y la orientación de las cajas en el palé. Esto describe una transformación 3D rígida en el sistema de coordenadas de la cámara. Por medio de la calibración mano-ojo, es posible convertir esta transformación en el sistema de coordenadas del robot. Ahora el robot «sabe» dónde y en qué tamaño están apiladas las cajas individuales en el palet. El robot puede ahora continuar con el siguiente paso y despaletizar el palet.
Resultado satisfactorio perceptible poco después de la puesta en marcha
Desde julio de 2021, la aplicación desarrollada por Cretec Cybernetics se utiliza con éxito en la intralogística de KH Lloreda. Gracias a la tecnología integrada, la empresa notó muy rápidamente un aumento significativo de la productividad. «Conseguimos un aumento de la productividad de alrededor del 50%. Lo hemos conseguido reduciendo considerablemente el tiempo de ciclo y la dinámica. El sistema es ahora capaz de capturar instantáneamente múltiples imágenes de la misma capa y proporcionar resultados más sólidos y fiables en comparación con la antigua tecnología de perfilado láser», informa Irene Vázquez Martín, de Cretec Cybernetics, y añade: «La combinación de robótica y visión artificial sigue ofreciendo un potencial increíble. Por ello, seguiremos persiguiendo el objetivo de ofrecer a los clientes soluciones mejores, más rápidas y más fiables.»
Fuente: Cretec-cybernetics.com
Otros artículos de interés: