Hoy os presentamos a Antonio Laiz Triana y a Oscar Torrents, dos profesores de Automatización y Robótica Industrial del Instituto Anna Gironella de Mundet de Barcelona. Junto con el resto del departamento, han desarrollado un proyecto educativo que ha traspasado fronteras nacionales e internacionales.
Hemos tenido el placer de entrevistarlos para que nos relaten cómo han logrado que un proyecto centrado en crear desde cero un brazo robótico articulado, termine convirtiéndose en un programa internacional de Erasmus+ (VETNM). Por si fuera poco, han iniciado un proyecto de robótica móvil que ha sido admitido para participar en el Asti Challenge 2020, a pesar de que finalmente fuese cancelado por la pandemia.

Antonio, Oscar, hay que celebrar los éxitos cuando llegan pero en el camino suele haber muchas piedras. En vuestro caso, ¿os habéis tropezado con muchas?
La verdad es que los tropiezos venían con piedras que no veíamos, pero a fuerza de ensayo y error, hemos conseguido aprender y superar cada una de las etapas en las que nos las hemos encontrado.
Nos gustaría que nos relataseis cómo fue el inicio de este proyecto tan interesante
Pues fueron intensos y emocionantes. Comenzamos en septiembre con un montón de motores, tornillos y barras encima de la mesa, a la vez que los alumnos comenzaban las clases. Desconocíamos si iba a funcionar ya que nunca habíamos impreso en 3D.
No obstante, la ilusión con la que comenzamos nos empujaba a realizar jornadas maratonianas hasta que Francisco, el conserje, nos echaba del centro porque había que conectar las alarmas. Por el mes de noviembre nos alegró ver que aquellos tornillos y motores comenzaron a moverse.
Tiene mucho mérito la forma en que lidiáis las limitaciones que habitualmente existen en los centros públicos (y también en los privados)
Para que te hagas una idea, empezamos a imprimir debajo de una salida de aire acondicionado. Nos generaba grandes problemas porque enfriaba antes de la cuenta el PLA y se acumulaban pelotas de material en los extrusores. Esta fue una de tantas que hemos pasado.

¿Imaginabas que para crear un brazo robótico ibais a convertiros en profesionales de la impresión 3D y de otras tecnologías?
Pues la verdad es que hemos tenido que reinventarnos. Para desarrollar los proyectos que estamos realizando es necesario integrar diferentes tecnología, muchas horas de mantenimiento de las impresoras y sobre todo diseño. Sin unos buenos principios de diseño los proyectos sufren mucho.
Recuerdo una gafas de visión 360º con las que estuvimos haciendo pruebas y pruebas hasta que conseguimos que la visión no fuese doble. Esto solo iba de una décima de mm en la separación de las lentes de las gafas. Una vez que el prototipo funciona, ya todo es mucho más fácil.

Recuerdo que de estas gafas, posteriormente hicimos una formación para el profesorado de Realidad Virtual y Realidad Aumentada, con las que se aplican metodología por proyectos y puede convertirse en un proyecto transversal dentro de los centros educativos. En esta ocasión se hizo la formación a través de la UNIFF de la UPC.
Como indicas os llevó mucho tiempo la impresión de las piezas. Antonio, ¿es cierto que en navidades Papa Noel te llevó a casa PLA para la impresora 3D?
Puedes estar seguro que todo el PLA que había en la escuela en ese momento estaba en mi casa. Fue porque no éramos capaces de imprimir con dos impresoras tantas piezas como hacían falta para la cantidad de alumnos que teníamos, y veíamos que ellos tenían más ganas que nosotros de montar un robot.
Creo que fue por el puente del 8 de diciembre cuando Antonio decidió llevarse las impresoras a casa (señala Oscar). Durante todo el mes estuvo imprimiendo piezas las 24 horas del día. El objetivo era que el primer día de clase después de navidades, los alumnos tuviesen a su disposición las piezas necesarias para iniciar el montaje de los 8 brazos robóticos.

Pero ahora estamos en las mismas (indica Antonio). He vuelto a llevarme dos impresoras a casa, las he reparado y estoy trabajando en los prototipos del año que viene, para que los alumnos el primer día de clase puedan empezar a programar. El hecho de intentar introducir el proyecto de ASTI Challengue dentro de su currículum académico nos obliga a tener todo listo para comenzar a programar los sensores de que disponemos.
Me gustaría que profundizaseis cómo ha sido la integración del software y la plataforma que utilizáis para desarrollar la cinemática inversa del robot
Bueno, como ya te puedes imaginar todo esto no se hace en un día ni en un curso académico. Además siempre que podemos o necesitamos ayuda de otros departamentos de la escuela se la pedimos. En el caso de la cinemática inversa, fue una colaboración entre el ciclo de Sistemas de telecomunicaciones e informática STI y el de robótica ARI. En un trabajo final de grado. Nos propusimos desarrollar con un alumno la arquitectura necesaria, a la vez que en robótica se estudiaba matemáticamente cómo calcular la cinemática inversa. Una vez que se supo cómo calcular a lápiz, se programó en Arduino y este programa es el que se encarga de verificar el funcionamiento que a su vez recibe los datos de una web.
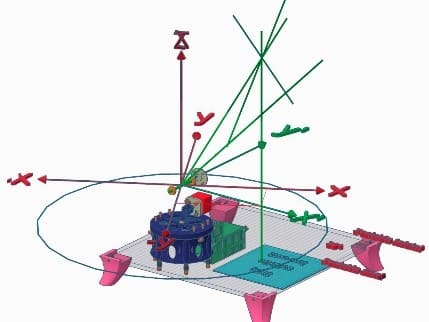
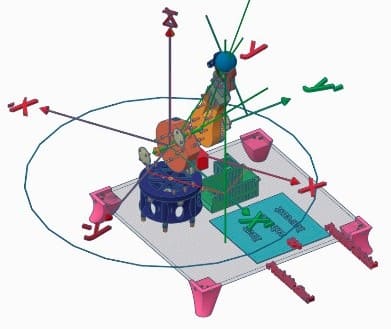
Te voy a comentar una cosilla más para las personas que nos lean. Además de esto que estamos comentando, se preparó una página web desde donde los alumnos pueden introducir los datos de los valores xyz y nos calcula los grados que deben girar los motores del brazo. Esta web la puede consultar cualquiera, aquí la dejo por si es del interés de alguien: cinematica.agmundet.es
Si se cambian las medidas de los brazos, calcula la cinemática inversa de cualquier brazo de tres grados de libertad. En las dos imágenes que se pueden ver en la web se pueden estudiar la descomposición de los triángulos que se necesitan para realizar los cálculos.
Me gustaría saber si habéis ofrecido acceso a vuestra herramienta a otros centros educativos
Es una idea que siempre nos ha pasado por la cabeza. Nosotros pensamos que cuantas más personas de diferentes ámbitos desarrollen y compartan tecnología, más enriquecedora será nuestra labor educativa y más vínculos podremos ofrecer a nuestros alumnos con otros entornos.
Tenemos contactos personales por whatssap con otros centros. Un ejemplo es el IES Gallicum de Zuera en Aragón. Estuvimos a punto de hacer con ellos una colaboración y seguimos en contacto por si se da la situación adecuada. Tienen un departamento de robótica muy dinámico, con el que más pronto que tarde, seguro que haremos alguna actividad conjunta.
El desarrollo de actividades viene acompañado de todo tipo de colaboraciones. De repente tienes una idea y comienzas a buscar, a preguntar y hasta que consigues que todo esté engranado requieres de la colaboración de mucha gente. Aunque te pueda parecer mentira, hasta de la Ferreteria Marimón que nos facilita lo tornillos y hemos reconvertido unos “tupperware” de macarrones en estuches para los prototipos de AGV, o de incluso de antiguos alumnos.
Con ellos seguimos manteniendo un contacto muy estrecho porque la convivencia ha sido muy intensa a lo largo de las numerosas actividades que realizamos. Un ejemplo, los carros sobre los que se mueven los brazo robots, están construidos por los alumnos de FP inicial, y esto generó un proyecto transversal de casi un curso. (En la foto puedes ver a los profes y alumnos que construyeron los carros/taquillas.)


¿Habéis contado con ayuda de alguna empresa del sector privado para desarrollar la tecnología?
Tenemos un proyecto muy relacionado con el brazo robótico impreso en 3D, y es incorporarle tecnología industrial OMRON. Llevamos dos cursos trabajando sobre este prototipo, y como ya podéis entender, desde OMRON a través de Toni Luna disponemos de todo el soporte y más. Esperemos que en el próximo curso logremos que el brazo se encuentre totalmente controlado por Sysmac.
Hemos contado con la colaboración de Jaume Collado de COVAL, una empresa de robótica que se dedica a trabajar con sistemas de vacío para poder coger con ventosas todo tipo de materiales. En una de las charlas que impartió en el centro, le pedimos si nos podían facilitar material industrial y ayuda técnica para implementar en el laboratorio una nueva herramienta que permitiese al brazo operar a través del vacío. Su predisposición fue inmediata. Estamos seguros de que su colaboración y sus aportaciones técnicas supondrán un gran avance. Si incorporamos tecnología industrial al proyecto, podremos desarrollar nuevas actividades y nuevos contenidos para los alumnos.

En su momento, y no nos queremos olvidar de nadie, se participó con el brazo robot en la 5º edición del “Pla de mesures Innovació a l’FP”, en donde nos concedieron 1800€ para el desarrollo del proyecto.
Habéis integrado al proyecto tecnologías avanzadas, como es el caso de la Visión Artificial y la interconexión de los dispositivos por red que os permite ampliar las capacidades de los brazos robóticos. ¿Cuál ha sido el resultado?
Hemos logrado incorporar al laboratorio con éxito las tecnologías que señalas. Tenemos desarrolladas tres actividades que permiten hacer que un brazo de los nuestros, situado en Turquía, Italia o Portugal pueda ser movido desde cualquier parte del mundo. No te puedes hacer idea de lo que significa hasta que terminas de ponerlo en práctica.
Otra de las actividades que desarrollan nuestros alumnos es la conexión de los diferentes brazos a un servidor que gestiona los movimientos de cada brazo. Puedes programar la secuencia en que deben realizar los movimientos, esperando a que termine el anterior para comenzar el siguiente.
Por último el tema de visión artificial lo tenemos desarrollado en una actividad que consiste en colocar en una bandeja de cartón seis piezas. Entonces se le dice al brazo, sin especificar la posición, que pieza se desea que retire de las seis y en qué bandeja se desea que la deposite, ya sea a la derecha o a la izquierda. A través de la cámara hace un proceso de visionado y perspectiva, consiguiendo dejar la pieza que se le ha indicado en la bandeja deseada.
Desde luego es un proyecto que se encuentra en permanente evolución
Así es. En el futuro pretendemos hacer que los prototipos que vamos a utilizar en el ASTI Challengue consigan desplazarse entre los brazos robóticos por unas pasarelas que ya tenemos diseñadas e impresas. Este vehículo AGV llevará en su baca diferentes piezas geométricas, prismas, cilindros o pelotas de ping pong. Serán de diferente colores y permitirá crear actividades de visión para que los brazos y los AGV interactúen en función de la pieza que lleve cada dispositivo. Este proyecto se encuentra en fase inicial, pero esperamos tener avances significativos a lo largo de los dos próximos cursos.

Los avances que habéis realizado os han permitido participar en un programa de Erasmus con intercambio de alumnos procedentes de Portugal, Italia y Turquía. ¿Cómo ha sido la experiencia y qué impacto ha tenido en los alumnos?
Bueno!!, bueno!!, esto fue una liada de nuestra compañera Cristina Antón. Nos pasamos dos años redactando la memoria hasta que nos concedieron el Erasmus. Currada grande de Oscar y Cristina hasta que nos lo aprobaron. Creemos que ha sido positivo para todos. Este curso nuestros alumnos han disfrutado de la experiencia en Portugal e Italia, y los del curso siguiente podrán hacer lo mismo en Turquía. También ha sido muy positivo para los países colaboradores, ya que disponen de unos brazos robóticos y de unas prácticas que les permiten empezar a desarrollar laboratorios similares al nuestro. Es cuestión de ver cómo evoluciona, quién sabe si pronto tendremos la oportunidad de montar actividades de laboratorio a laboratorio con el tiempo.
En estos momentos se nos pasa por la cabeza crear otros proyectos Erasmus, pero debemos meditarlos un poco más.
Anteriormente habéis mencionado el vehículo de conducción remota con el que ibais a participar en el Asti Challenge 2020. ¿Podéis hablarnos de este interesante proyecto y la tecnología que integra?
En la asignatura de programación avanzada existe una unidad formativa que trata todo el tema de programación de sensores. Un día mientras buscaba noticias en internet, leí un artículo acerca de ASTI Robotics. Como era una empresa de robótica de Burgos me llamo la atención y contacte con ellos. De varios correos salió una fecha de visita para el mes de agosto, dado que yo paso parte del verano en Palencia o Becilla de Valderaduey, un pueblecito de la provincia de Valladolid.
De este modo tan inusual me reuní con Victor, el jefe de RRHH, y me explicó en qué consiste ASTI Challengue. Me pareció interesante introducir el coche en una Unidad Formativa de este módulo y comencé a trabajarlo con los alumnos. Nuevamente fue una lucha contra reloj contra las impresoras. Partíamos de una caja de la Raspberry que teníamos desarrollada para los brazos y esto nos facilitó bastante las impresiones en 3D y el diseño. Cuando llegaron los primeros componentes servidos por Electrrio fue una gran ilusión y cuando empezamos a ver que aquello se empezaba a mover ni te cuento.
Lo que más interesante me resulto es que ASTI Challengue está organizado para las escuelas y con criterios de escuela, por lo que hay que hacer una presentación del equipo, trabajar como tal, y presentar una memoria con su presupuesto. Sin duda participar es muy importante para los alumnos de Formación Profesional. Si te aceptan en esta fase es cuando pasas a la fase online, en donde debes programar el coche para superar un reto de los que se presenta en la competición, hacer un vídeo y mandarlo. Si pasas esta fase es cuando puedes ir a competir a Burgos. Creo recordar que este año eran 72 equipos los clasificados para participar.
Nos preguntas por la tecnología. Esta solo puede ser aquella que las escuelas se pueden permitir, en este caso con la Raspberry PI es con la que controlamos todo el tema de visión y programación en Python. Hablando de tecnología, el brazo actual se controla con Arduino y con comunicación con la Raspberry Pi, pero ya estamos haciendo conexiones con diferentes drivers para trabajarlo todo desde la Raspberry Pi y esto nos permitirá generar nuevas situaciones de programación más complejas que requerirán de alumnos y profesores un mayor nivel de implicación en la programación.
Además de los ambiciosos proyectos que en la actualidad tenéis entre manos, nos gustaría saber si tenéis alguno nuevo en mente para el próximo curso
Siempre se ponen en marcha alguno nuevo o se avanza alguno que ya viene del año anterior. Por ejemplo estamos montando una impresora 3D DIN A3 a partir de una impresora que se nos fundió. Utilizamos la misma tecnología de las impresoras que tenemos y la que utilizan los brazos del laboratorio. Ya se ha comenzado durante este curso y seguramente se continuará con ella durante el curso que viene.
Nada más que felicitaros por el excelente trabajo que habéis realizado en el Instituto Anna Gironella de Mundet y animaros a que sigáis estimulando a las nuevas generaciones con proyectos tan ilusionantes
Una última cosa si me permites. Nosotros somos los promotores de todo este proyecto, de esta metodología y de las actividades que lo acompañan, pero los verdaderos protagonistas de este proyecto son los alumnos. La verdad es que cada vez les exigimos más en función de las actividades que a nosotros, y a veces a ellos, se nos van ocurriendo.
Cada año, para dejar evidencias del trabajo que se realiza en esta asignatura, pedimos a nuestros alumnos que realicen el portafolio de la asignatura en un blog. En los blogs de este curso, además de ver las actividades de esta asignatura, se pueden ver las evidencias de las movilidades del proyecto Erasmus+ VETNM, por lo que son mucho más divertidos, sobre todo para los alumnos que han participado. Al final del artículo os dejamos las direcciones de las webs para que podáis echarle un vistazo.
Nos gustaría saludar y dar las gracias a todas las personas que no hemos nombrado y que están colaborando con nosotros, a todos los antiguos alumnos con los que seguimos manteniendo contacto y nos comparten su hacer diario.
Esto va dedicado para los alumnos que lo lean y que lo entenderán perfectamente: “Y todo esto ¡¡¡SIN POMAH!!!”, frase que daría para otras dos entrevistas y explicar las experiencias de VEX Robotics en EEUU. Muchas gracias a Revista de Robots por esta oportunidad que nos habéis brindado para hacer lo que nos dicen nuestros padres desde pequeños, !!Tienes que compartir con tu hermano los juguetes!!
Blogs del CFGS de Automatización y robótica industrial ARI
- Robotpasoapaso.wordpress.com (Primer curso)
- Roboticstep.wordpress.com (Segundo curso)
- Wildhogworkshop.wordpress.com
- Starkrobotics745726150.wordpress.com
- Automatitzacioroboticacfgs.wordpress.com
A continuación te dejamos el enlace para que puedas conocer otros artículos de Oscar Torrents y Antonio Laiz
Revista de Robots te recomienda: