
Las garras robóticas son una de las partes más importantes de la automatización de un proceso productivo al ser el punto de contacto entre una máquina automática o robot y un proceso de fabricación. Ubicado en el extremo o muñeca de un brazo robótico, los gripper y las pinzas robóticas son componentes con tecnología avanzada que nos permiten fijar una herramientas o sujetar piezas en función de los volúmenes y geometrías de las mismas.
¿Quieres información sobre un gripper o pinza robótica?
Si necesitas adquirir un gripper robótico te recomendamos que te pongas en contacto con un comercial de ROBOTS XL para que te asesore y te ofrezca la mejor solución de agarre que se ajuste a tus necesidades. Disponen del catálogo más grande del mercado de grippers, pinzas, garras y sistemas de sujeción para ofrecer las mejores soluciones industriales de agarre.



Ver información sobre garras robóticas
Solicita información en: Info@robots.shopping








Ver más información sobre estas garras robóticas
¿Necesitas que te asesore un experto?

En ROBOTS XL encontrarás el gripper que estás buscando
Características de un gripper de sujeción robótico
Antes de instalar una pinza de agarre es necesario conocer las necesidades y los conceptos básicos en la ejecución de una tarea a realizar.
- Fuerza: En función de la pieza que se tenga que sujetar, se necesitará mayor o menor fuerza. Existen grippers que permiten configurar y ajustar la presión y fuerza.
- Precisión: Esta variable dependerá del robot. Pero, en caso necesario, es posible añadir un sensor de fuerza para ayudar a la precisión.
- Carrera: Es la distancia que existe entre los dedos de la garra.
- Repetitividad: Repetir una y otra vez el mismo movimiento con el mismo grado de precisión.
- Velocidad: Tiempo que tarda en realizar un ciclo de trabajo. La “carrera” del gripper es necesaria para calcular el tiempo de ciclo.
Tipos de pinzas y garras de sujeción
El tamaño, la forma y el peso de la pieza influirán en el tipo de pinzas a instalar y la forma de accionamiento de las mismas. A continuación veremos algunos de los tipos de garras de robot más comunes e importantes en la actualidad.
Gripper de dos dedos
Las pinzas de dos dedos son las más sencillas en su configuración y se adecuan a muchos de los productos industriales existentes. Dentro de este grupo se pueden encontrar varias opciones: con control de distancia en cierre y apertura, con control de presión o con control de apertura. El accionamiento puede ser eléctrico o neumático y suelen ser pinzas paralelas aunque también tienes a tu disposición pinzas angulares.
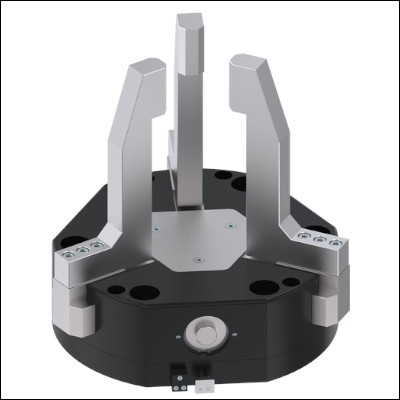
Garras de tres dedos
Aunque menos utilizado que el de dos dedos, este tipo de gripper robótico es perfecto para aquellos trabajos que requieran una mayor delicadeza pero con fuerza y precisión. Son también muy válidas para agarrar más de un objeto, pero el hecho de incluir un dedo más, las hace más costosas. Este tipo de garra es perfecto para manipular tubos largos.
Garras de dedos flexibles
Uno de los gripper más novedosos del mercado actualmente. Muy útiles para coger objetos variados pero resultan se ven muy limitadas en cuanto al volumen y el peso del objeto a coger se refiere. Perfecto para trabajos que requieran manipular objetos delicados y muy utilizado en robots colaborativos.
Bola flexible rellena de granos
Consiste en un globo de látex relleno de granos que se coloca sobre el objeto a coger y adopta su forma y mediante un sistema de succión de aire, atrapa el producto. Muy sencillo y versátil. El diámetro del globo puede ser de cualquier tamaño y el material de relleno muy variado.
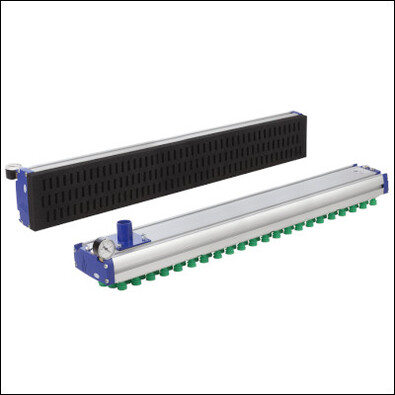
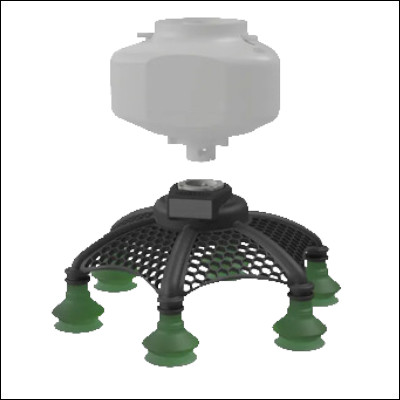
Grippers de vacío
Las pinzas de vacío están compuestas por ventosas que pueden ser de goma o poliuretano y se encargan de coger los productos mediante un sistema de vacío. Este tipo de sujeción es el más indicado para mover superficies como vidrio, planchas metálicas, plásticos o cartones.
Garras para paletizado
Son garras grandes para el paletizado de productos muy variados, ya que pueden ser diseñadas para mover desde cargas de gran volumen y peso, hasta ligeros separadores de capas. Se pueden utilizar desde planos aspirantes a complejos sistemas de vacío y mecánicos diseñados a medida.
¿Necesitas que te asesore un experto?
Si necesitas adquirir una garra o un gripper para tu robot permite que un distribuidor especializado en productos para robots te aconseje cuál es el modelo que más encaja con las características de tu proceso

Solicita información en: Info@robots.shopping
Amplio catálogo para optimizar el agarre de los procesos
Garras impresas en 3D
La impresión 3D permite auto-fabricar este tipo de herramienta robótica gracias a plataformas de diseño donde descargarse los distintos modelos. Este tipo de garras no admite mucho peso y la fuerza a aplicar en ella no puede ser muy grande.
Tipos de accionamiento de pinzas y garras
Las garras robóticas se pueden clasificar en tres grupos en función de su sistema de accionamiento. Se puede distinguir entre:
- Accionamiento neumático: Los gripper con accionamiento neumático son los más utilizados. Con poco peso y un tamaño pequeño es la solución perfecta para empresas de manufactura con poco espacio. Asimismo, la energía que necesitan es mínima. Pero este tipo de accionamiento requiere una serie de accesorios añadidos, como pueden ser válvulas, mangueras o un controlador lógico programable (PLC). Los grippers activados mediante esta energía son más rápidos que los eléctricos.
- Accionamiento hidráulico: este tipo de accionamiento es el más indicado para soportar cargas de gran tamaño y peso. Su instalación inicial y mantenimiento es más compleja, pero a la larga se perfila como un sistema duradero y fiable. Necesita de líneas hidráulicas, válvulas, PLC y bombas para su correcto funcionamiento.
- Accionamiento servoeléctrico o eléctrico: Es necesario un controlador adicional al gripper robótico, pero una vez instalado la conectividad resulta muy simple y fácil. Utilizar este tipo de accionamiento supone un ahorro de energía y mantenimiento.
Cómo elegir la mejor pinza robótica
Se debe tener en cuenta que el proceso de manipulación de productos es distinto en cada aplicación y el catálogo de sistemas de agarre que tenemos disponible es muy variado. Por lo tanto, es necesario conocer profundamente la línea de trabajo y el producto con el que se va a trabajar para poder elegir correctamente las pinzas robóticas que mejor se adecuen a la tarea a realizar. Para la correcta elección de un gripper es necesario conocer en qué punto de la línea de trabajo actuará y de qué forma encajará con las exigencias solicitadas, así como qué objeto o pieza será la que sujete.
También será importante saber cómo será el lugar de trabajo donde esta garra va a realizar sus funciones; es decir, si se trata de una gran factoría, una línea de trabajo, un laboratorio, una zona limpia… La correcta elección del accesorio para el robot determinará su correcto funcionamiento y la mejora en los procesos productivos de sus clientes
¿Quieres comprar un gripper con pinzas para un brazo robótico?
Una vez definidas las necesidades del proceso de producción, es necesario elegir cuidadosamente el tipo de garras adecuado para realizar las operaciones. Debemos detectar las particularidades de las piezas, como es el material, peso, volumen y textura antes de comprar un gripper y pinza de sujeción adecuado. A continuación detallamos los diferentes tipos que existen.
Empresas fabricantes y distribuidores de pinzas robóticas
Dos de los fabricantes de gripper robóticos más importantes del sector son Schmalz y Zimmer Group, que facilitan la integración de robots colaborativos en las fábricas gracias a que su catálogo de productos cuentan con numerosos tipos de gripper. Ambos fabricantes cuentan con una red de distribución mundial como es el caso de ROBOTS XL, quien ofrece soluciones de agarre a cualquier todo tipo de ingeniería industrial que destacan por ser fáciles de usar, ya sean garras de tipo neumático, eléctrico y de vacío.

Si te estás iniciando en el sector de la robótica industrial te mostramos algunas de las marcas de robots industriales más importantes del mundo en las que se instalan este tipo de pinzas robotizadas.






Información adicional
Qué es un gripper robótico
Por definición un gripper significa pinza en castellano, a la que también se le llama gripper herramienta EOAT (acrónimo en inglés de End Of Arm Tooling). Se colocan en la muñeca del robot y varía en función del diseño y la aplicación
Para qué sirve una garra
La automatización industrial requiere introducir robots en sus cadenas de montaje con el fin de minimizar los costes de producción, mejorar la competitividad, así como aumentar la producción y mejorar la calidad del producto.
¿Dónde se utilizan?
Para realizar un proceso productivo los robots requieren de herramientas (pinzas o gripper) para manipular los productos. Se utilizan tanto en cadenas de ensamblaje, soldadura, corte, Pick & Place, pintura, empaquetado, paletizado, etc…