
Los sistemas de sujeción y grippers para soldadura robotizadas ofrecen al sector industrial nuevas aplicaciones mecatrónicas que garantizan la resistencia de las operaciones y aumentan la fiabilidad del proceso. Existen fabricantes especializados en desarrollar pinzas y garras para robots soldadores, incluso personalizadas en función de la antorcha de soldadura. A continuación te presentamos los productos de ROBOTS XL, un proveedor de productos industriales con el que mejorar la calidad de tus procesos de soldadura y aumentar su productividad.
Información sobre sistemas de agarre



Ver información sobre las garras robóticas
Solicita información en: Info@robots.shopping
Si tienes definidas las características de tu aplicación permite que sea un profesional quien te ofrezca la mejor alternativa para la herramienta que necesitas
En ROBOTS XL se basarán en su experiencia en el sector para ofrecerte las mejores soluciones de agarre para robots soldadores








Ver más información sobre estas garras robóticas
Solicita información en: Info@robots.shopping
¿Quieres comprar un gripper con pinzas para un robot soldador?

Solicita información en: Info@robots.shopping
En ROBOTS XL encontrarás el gripper que estás buscando
¿Qué es un gripper y para qué sirve un sistema de agarre?
Un gripper en castellano significa pinza, aunque también se identifica como herramienta EOAT (acrónimo en inglés de End Of Arm Tooling). Las pinzas de agarre es un accesorio robótico destinada a robots industriales con el fin de aumentar la producción de un proceso. Normalmente simulan el comportamiento de una mano humana y son el punto de unión entre una máquina robótica y un objeto. Han sido confeccionados para todo tipo de agarres, como es el caso de montaje de piezas, para Pick & Place o paletizado.
Tipos de sistemas de agarre para un robot industrial
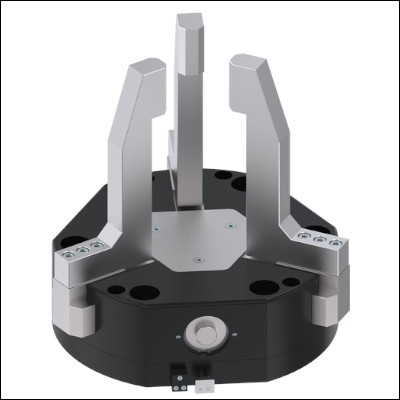
- Garras de dos dedos. Este tipo de pinza de agarre es el más común para el agarre de piezas. Son pinzas que se adaptan fácilmente a la geometría de las piezas y generalmente suelen ser planas y paralelas, aunque también tienes a tu disposición angulares.
- Gripper de tres dedos. El sistema que emplea es muy parecido a la pinza de dos dedos, sólo se diferencian entre sí porque la de tres dedos ofrece mayor delicadeza a la hora de coger una pieza. Este sistema se emplea cuando las necesidades del producto lo requieren.
- Gripper de dedos flexibles. Este sistema de agarre puede ser consideradas como innovadoras ya que llevan pocos años en el mercado. Están especialmente recomendadas para objetos que necesitan un elevado grado de sensibilidad en la manipulación.
- Gripper con forma de bola flexible. Existen pinzas de materiales blandos pueden disponer de una forma de bola para aumentar las capacidades de agarre. Normalmente han sido creadas con materiales de látex y dentro llevan granos. El sistema de agarre de un objeto es muy eficaz, ya que se genera dentro de la bola una succión por vacío que es capaz de agarrar el objeto deseado.
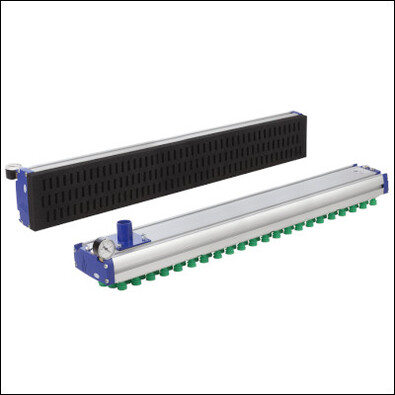
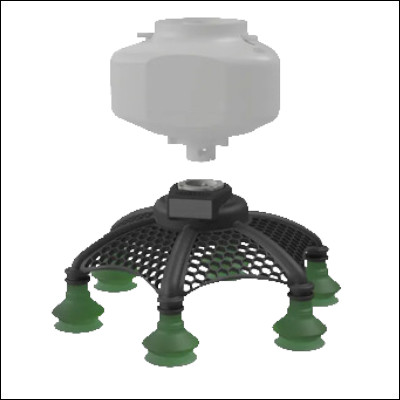
- Gripper de vacío. Al igual que el sistema anterior, la pinza incorpora un sistema compuesto por ventosas que permiten coger objetos por medio de vacío. Está especialmente indicado para coger objetos metálicos, vidrios, plástico cartón.
- Gripper o pinzas para paletización. Las pinzas que se emplean para los robots paletizadores pueden incorporar múltiples sistemas de accionamiento, tanto neumáticos, hidráulicos como eléctricos. Destacan por ser fabricados en función de cada aplicación.
- Garras ligeras fabricadas en 3D. El desarrollo de la impresión 3D está revolucionando el sector ya que tú mismo puedes imprimirlos en pocas horas en tu propia impresora 3D. Estas garras sobresalen por su poco peso permitiendo la optimización de los procesos productivos. Ahora puedes comprar un gripper a tu proveedor y poder personalizarlo en el programa en la oficina técnica de tu empresa. Las herramientas impresas en 3D te permiten eliminar los tiempos de espera cuando se daña un accesorio. ROBOTS XL se ha convertido en un referente en el sector de la fabricación aditiva para componentes industriales.
En función del modelo y el fabricante, todos estos sistemas pueden incorporar sensores que detectan los datos relevantes de la manipulación, como es el caso de la presión, el cierre y la apertura de las pinzas por medio de accionamientos eléctricos, hidráulicos o neumáticos.
Aspectos a tener en cuenta antes de comprar unas garras para un robot de soldadura
Hasta hace bien poco seleccionar sistema de sujeción se basaba en buscar un gripper que se adaptase a la geometría de las piezas sin que te ofreciese información sobre lo que ocurría durante el proceso productivo. La evolución de la tecnología digital nos deja parametrizar aspectos como la temperatura del accesorio, aunque existen otros factores claves para un uso prolongado de los sistemas de sujeción. La fuerza de fijación definida por el actuador, la precisión del posicionado, el grado de repetibilidad y la vida teórica del equipo son aspectos claves a tener en cuenta. Asegurar un desgaste controlado prolonga los tiempos de mantenimiento.
Como hemos mencionado, para elegir correctamente el gripper idóneo se antoja imprescindible conocer bien el producto, ya que los materiales a manipular, el peso, el tiempo del ciclo y la textura son aspectos que terminarán siendo determinantes para una buen sujeción. Otro aspecto fundamental será el entorno en el que va a trabajar, ya que aspectos como el ruido y la limpieza son determinantes para la industria alimenticia y bienes de consumo.
¿Necesitas que te asesore un experto?

Solicita información en: Info@robots.shopping
Amplio catálogo para optimizar el agarre de los procesos
Tipos de accionamiento de pinzas y garras
Las garras robóticas tienen tres tipos de accionamiento:
- Accionamiento neumático. Los gripper neumáticos son del tipo de accionamiento más empleado en el sector industrial. Tienen la particularidad porque son muy ligeros y por su reducido tamaño, detalle en ocasiones determinante a la hora de integrar equipos. El ahorro de energía es considerable en comparación a otras aplicaciones y tienen un tiempo de respuesta superior a los eléctricos y conllevan tener que integrar electroválvulas, tubos y un controlador (PLC).
- Accionamiento hidráulico. Este sistema es el más apropiado para levantar grandes pesos. El equipo que necesita una pinza hidráulica es más complejo pero hay que incidir en que es un sistema seguro y duradero. Como todo equipo hidráulico necesita tubos para el circuito hidráulico, electroválvulas, un PLC y bombas de presión.
- Accionamiento servoeléctrico o eléctrico. La pinza necesita un controlador adicional que es sencillo de programar. Este sistema apenas conlleva mantenimiento y existen sistemas alternativos con menor uso, como los gripper magnéticos, que ofrecen al sector un buen rendimiento.
Características a detectar antes de comprar pinzas para un robot soldador
Antes de comprar una garra robótica es necesario determinar las particularidades del trabajo.
- Fuerza. En función de las necesidades de la fuerza de fijación se necesita poder configurar la fuerza de agarre del actuador.
- Precisión. En función de la precisión del posicionado que necesite el proceso se debe de utilizar con una aplicación más preciso
- Recorrido. Es la medida que tiene entre los dedos el sistema de sujeción. Algunos modelos del mercado son pinzas ajustables que te ayudan a mejorar el proceso de agarre
- Repetibilidad. Es la cantidad de veces que tiene que hacer un ciclo sin que varíe el posicionamiento. En función de la cantidad de veces que tenga que realizar un proceso se emplearán materiales que aseguren la fiabilidad del proceso.
- Velocidad. Es necesario medir el tiempo de ciclo que necesitamos para asegurarnos que el rendimiento del gripper sea el correcto.
- Durabilidad. Es necesario conocer las expectativas de vida del componente y cómo se va a aguantar el desgaste. Es por ello que hay accesorios que incorporan de un sistema de autoengrase para garantizar el uso correcto de la aplicación.
Sistemas de agarre inteligentes
Los sistemas digitalizados para la Industria 4.0 garantizan soluciones de fabricación flexibles. Las técnicas de sujeción permiten poner en disposición de los profesionales sistemas para la manipulación autónoma que ofrecen la capacidad de automatizar prácticamente cualquier proceso. Su finalidad es aumentar la capacidad de fabricación de trabajos repetitivos que requieren amoldarse ante la diversidad de los productos.
La integración de sensores de fuerza y de temperatura permiten parametrizar su funcionamiento y parametrizar el desgaste de las herramientas sin tener que utilizar elementos o sensores externos al propio EOAT (End of Arm Tooling). Las herramientas inteligentes se integran perfectamente a los softwares de los brazos robóticos para simplificar su instalación.
Tecnología 3D para pinzas de agarre
La evolución que se está produciendo en la fabricación aditiva ofrece la creación productos innovadores a medida de las necesidades del cliente. La impresión en 3D se ha convertido en una solución eficiente que pretende garantizar mayor adaptabilidad así como suprimir los tiempos de entrega de los recambios de materiales.
En España ROBOTS XL fabrica accesorios para el sector de la automatización utilizando exclusivamente fabricación aditiva. Una de las ventajas de la fabricación aditiva es que te permite trabajar con distintos compuestos, los cuales pueden ser poliamidas, el metal, látex o silicona.
¿Qué es un sistema móvil de agarre?
Para dar respuesta a las cadenas de suministro tenemos a nuestra disposición una gama de sistemas móviles de agarre que se usan en equipos en batería o autónomos para fabricación de productos finales. Dichas soluciones se utilizan en el transporte de pallets en almacenes, centros de trabajo o puestos de verificación en sectores industriales, farmacéutico, la industria química o en el campo de la medicina.
Empresas fabricantes de accesorios y sistemas de agarre para robots soldadores
Son muchas las ingenierías robóticas que en todo el mundo fabrican accesorios para el sector de la automatización, sistemas de vacío y de sujeción para brazos robóticos. Algunas de las más importantes son Zimmer Group y Schmalz, las cuales trabajan con distribuidores como ROBOTS XL para que pongan toda su experiencia a tu servicio. Además existen otros fabricantes como Soft Robotics, Bimba, OnRobot, Schunk, Weiss Robotics, ATI, PIAB, Gimatic o ElectroCraft entre otros.

Seguridad en los gripper para robots colaborativos soldadores
La robótica dentro de la Industria 4.0 ha avanzado por medio de la robótica colaborativa. El humano y el robot ahora comparten entornos de trabajo que tienen que asegurar la integridad de los profesionales. De este modo las garras son confeccionadas cuidadosamente para que no tengan esquinas y controles de fuerza. Para ello tienen sensores que detectan y pausan los procesos ante un sobreesfuerzo.